Wi-Fi машинка с камерой сегодня не новинка, и её можно купить в магазине. Но стоит она не дёшево. Так же можно купить конструктор на базе Arduino и Raspberry Pi. Которые так же позволяет управлять с помощью Wi-Fi и передавать изображение. Это достаточно неплохой конструктор, минусом является большое количество проводов и сложная схемы подключения. Сегодня в проекте мы соберём Wi-Fi машинку с камерой, используя минимальное количество компонентов. Что упростить схему подключения и сборку.
Я уже делал Wifi машинку на ESP8266: «Самодельная Wifi машинка на NodeMCU. Машина делает дрифт». А также делал машинку на Ардуино. Чтобы не собирать машинку полностью шоссе возьму из старого проекта: «Машинка на радиоуправлении. Arduino + nrf24l01 + пульт.»
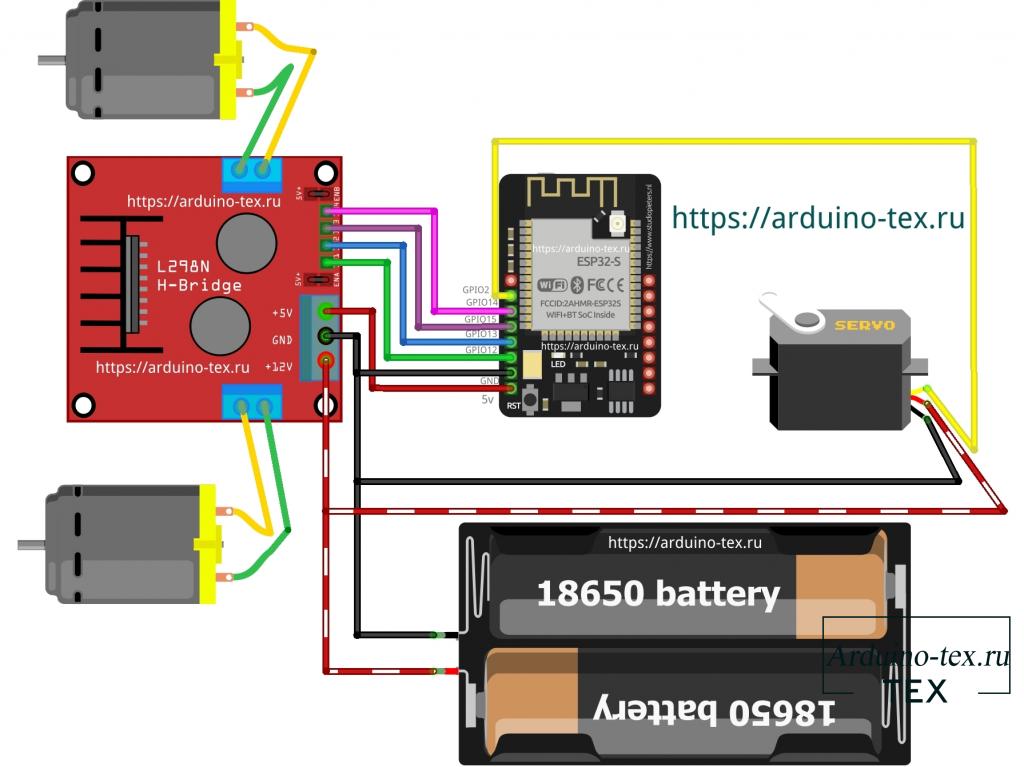
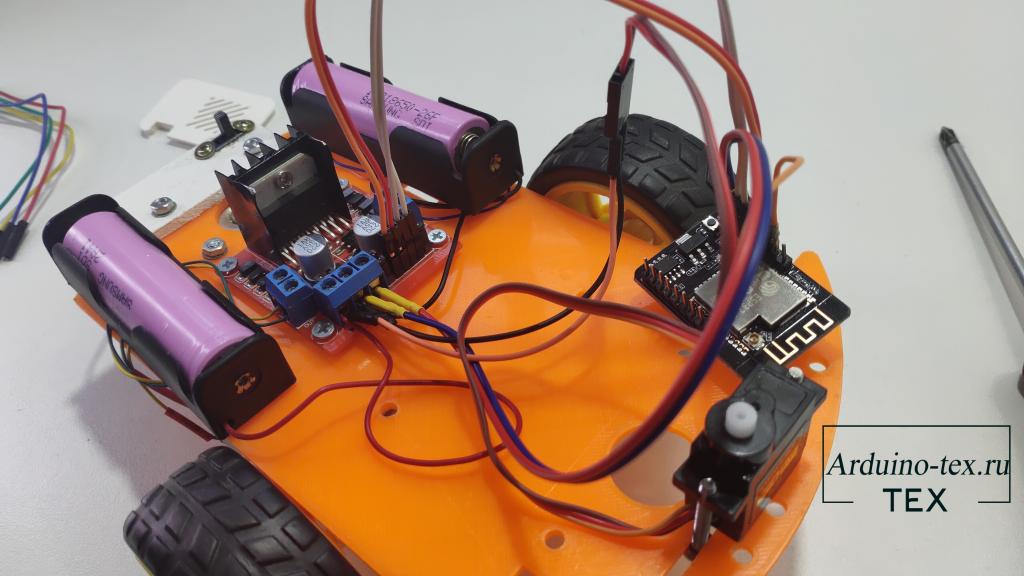
В связи с тем, что робоплатформу использовал уже в предыдущем проекте. А так же, часть схемы оставили без изменения. Поэтому останавливается на описание не буду. Вы можете купить готовую робоплатформу, чтобы не думать о том, как её сделать или собрать.В данном разделе статьи рассмотрим схему питания и драйвер l298n.
Драйвер L298N используется для управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов.
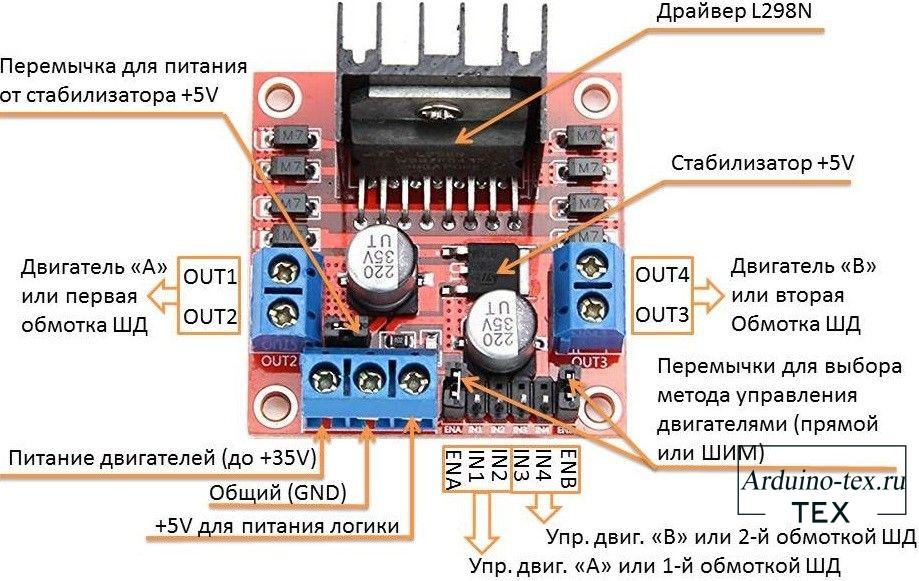
Основываясь на полученные знания, мы можем использовать драйвера как источник питания для платы ESP32. Для этого нужно установить перемычку, питание от стабилизатора 5 вольт.
Но прежде чем собирать машинку, нежно загрузить код в ESP32-CAM.
Код для машинки с камерой можно скачать внизу статьи в разделе «файлы для скачивания».
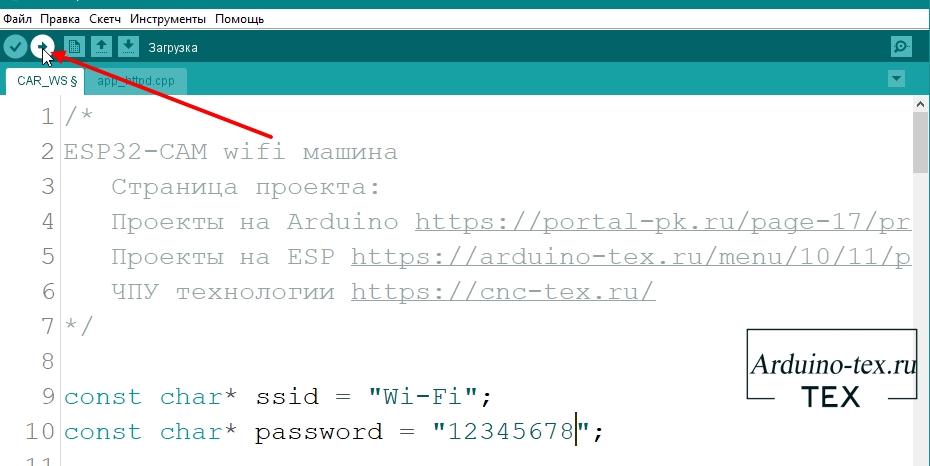
Перед загрузкой кода необходимо указать подключение к вашей WI-Fi сети.
const char* ssid = "Wi-Fi"; const char* password = "12345678";
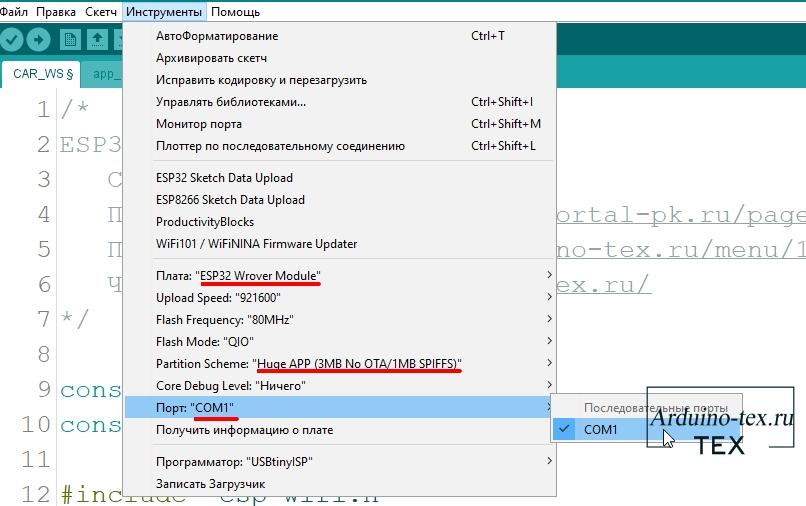
И в принципе больше настраивать ничего не нужно. Самое главное – правильно выбрать плату при загрузке кода.
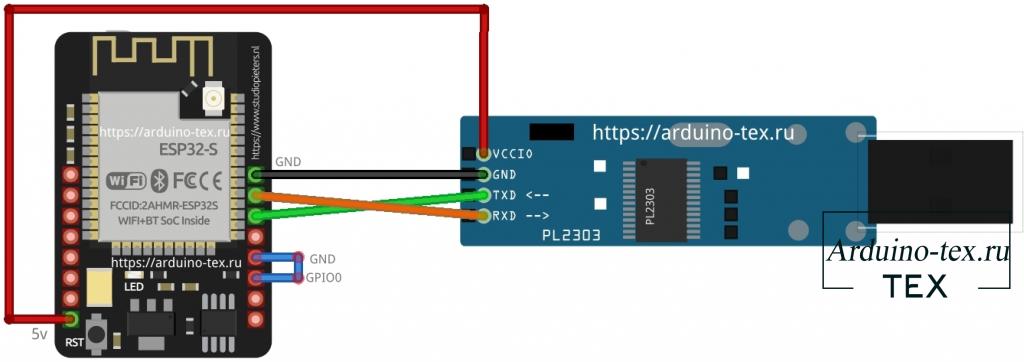
Для того, чтобы загрузить код, используя USB-to-UART конвертор PL2303HX. Как им пользоваться рассказал в статье: «USB-to-UART PL2303HX. Установка драйверов на Linux, Windows, Mac OS».
Для загрузки кода подключим PL2303HX к ESP32-CAM по схеме.
Нажмём на кнопку «загрузить».
И в принципе больше делать ничего не нужно, после компиляции код автоматически загрузится в плату.
Пришло время все собрать и установить на машинку. Но для начала давайте рассмотрим, по какой схеме все подключать.
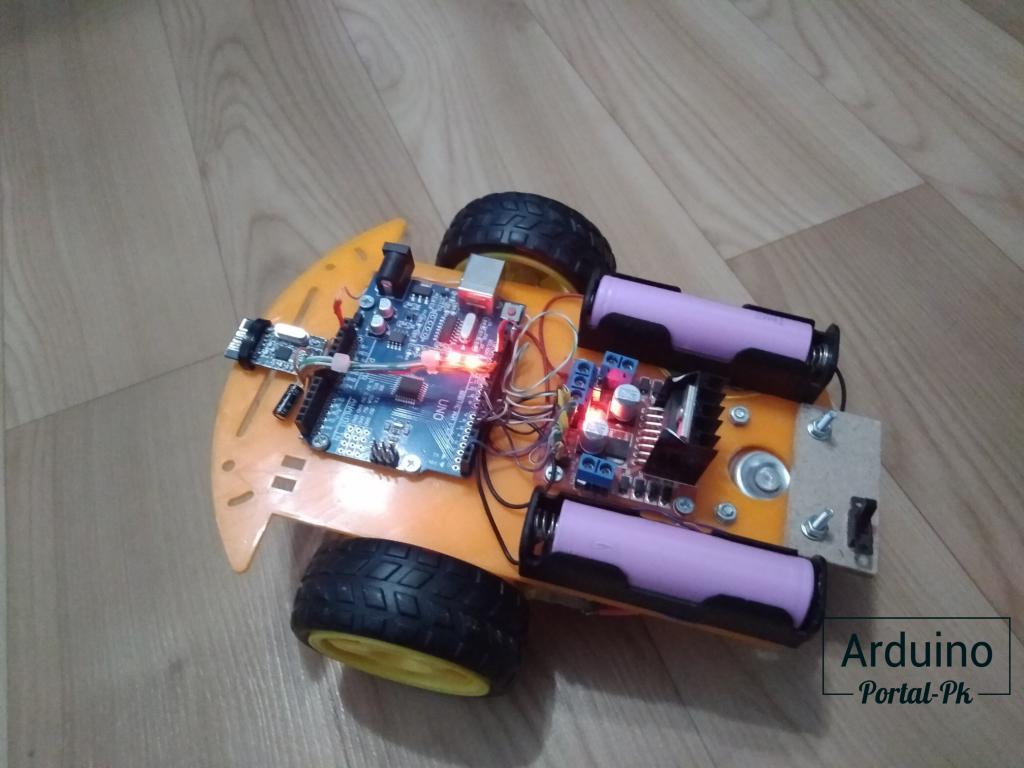
Теперь можно приступить к сборке машинки.
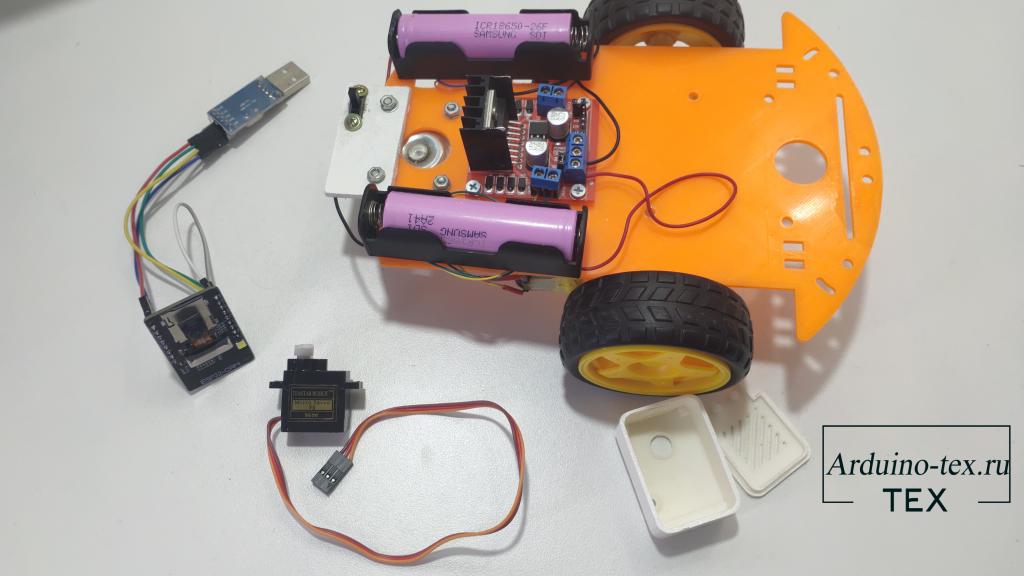
Так как у меня машинка частично собрана, установлены драйвера, подключены мотор-редукторы, установленные аккумуляторы, осталось установить сервопривод и ESP32-CAM.
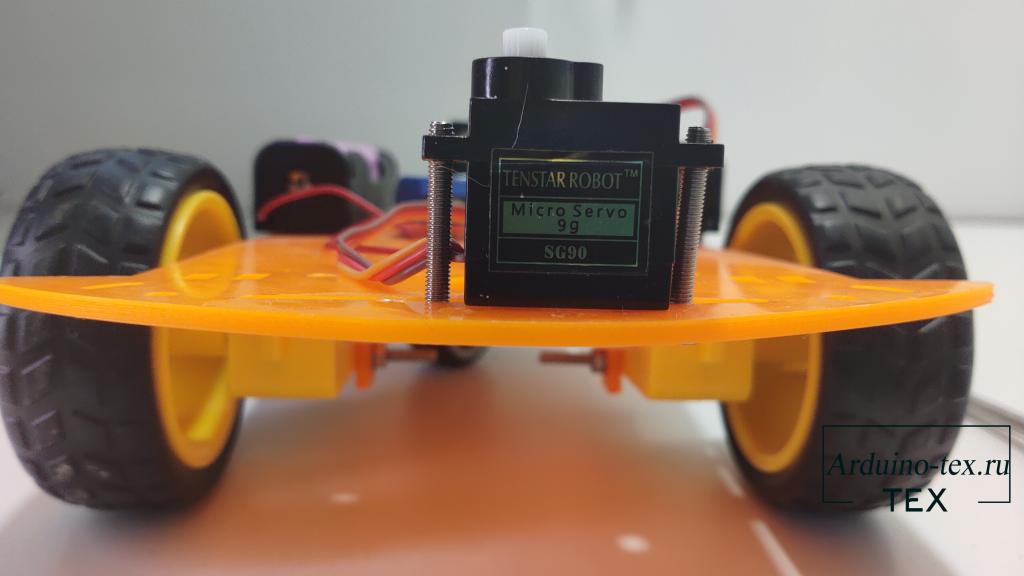
С помощью 2 видов М3 прикрепляю сервопривод.

С помощью термоклея приклеиваю качалку к корпусу ESP32.
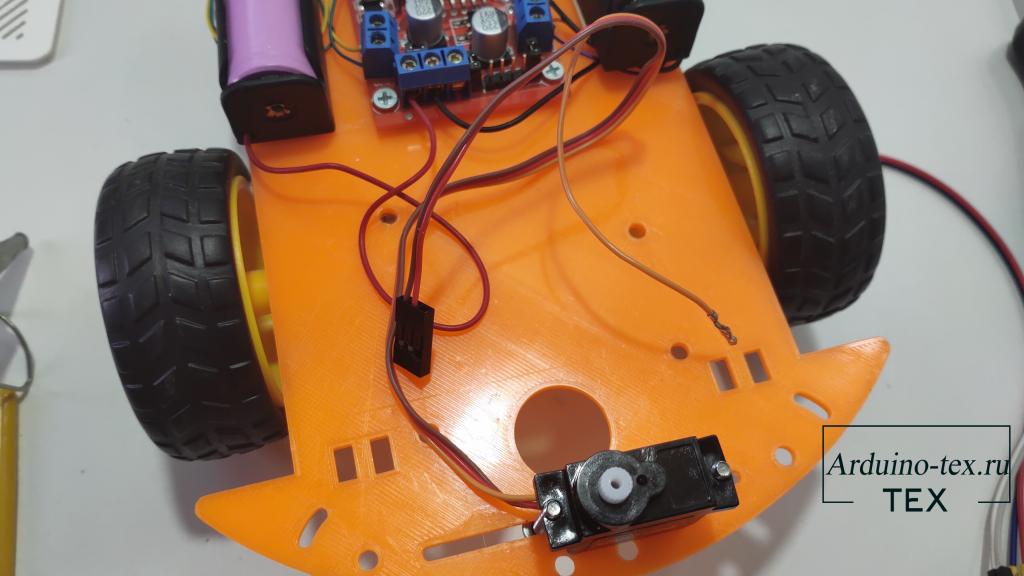
После чего нужно разделить провода сервопривода, отделив информационный провод.
Зачем подключают все провода к ESP32-CAM по схеме, которую рассмотрели выше.
Устанавливаем микроконтроллер корпус. Но, к сожалению, задняя крышка не закрылась, помешались провода. Пришлось с помощью нано – инструмента исправить досадное упущение.

После всех манипуляций получился вот такой результат.
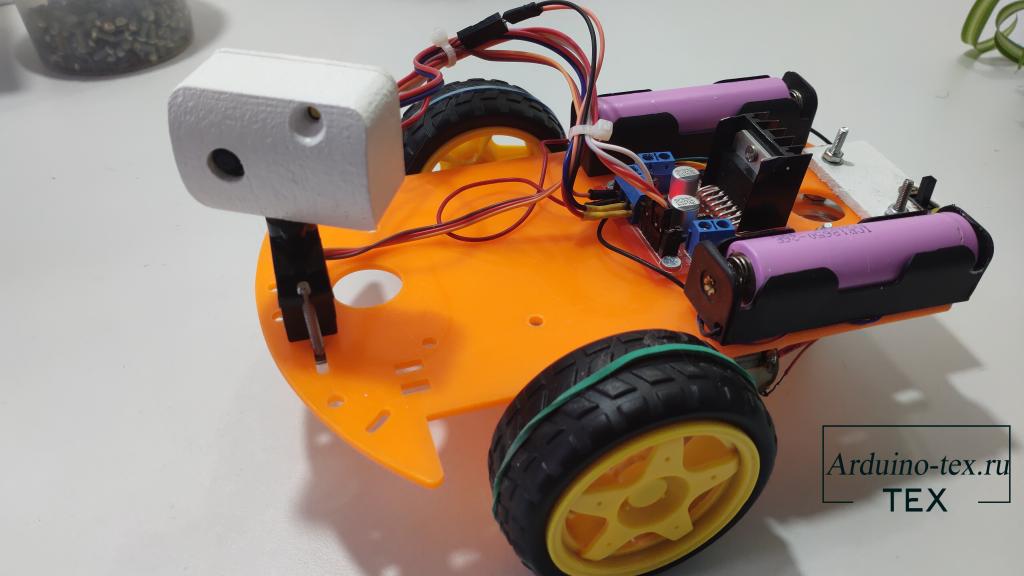
При езде по скользкому полу: ламинату, линолеуму. Время от времени пробуксовывают колеса. И машинка постоянно заворачивает то в одну сторону, то в другую. Для улучшения сцепления на колеса надел канцелярские резинки.

Немного юмора по данной теме. Wi-Fi машинка с камерой – отличное устройство для поиска потерянных носков в тёмных местах, особенно под кроватью. Там можно найти не только носки, но и достаточно неожиданные вещи. Главное в это время не вести прямую трансляцию, а то мало ли что могла упасть под кровать. =)
Несмотря на то, что машинка получилась достаточно функциональная и простая в сборке. Есть пару минусов:
Ну, есть и плюсы. Основной плюс – это возможность управлять с любого устройства: с телефона, планшета или персонального компьютера.
Есть желание сделать приложение для телефона, чтобы управлять, стало ещё удобнее.
Понравился проект Wi-Fi машинка с камерой на ESP32-CAM? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье









Файлы для скачивания
| Код с подключением к вашей WI-Fi сети.zip | 8 Kb | 2406 | Скачать | |
| Код подключения к своей точке доступа IP 192.168.4.1.zip | 7 Kb | 2092 | Скачать | |
| Arduino 2WD Robot Chassis.zip | 590 Kb | 1825 | Скачать | |
| ESP32-CAM_case.zip | 332 Kb | 1934 | Скачать |
Привет. Подскажи пожалуйста как называется "esp_wifi.h" эта библиотека, чтобы добавить ее. Пол дня копался так не наше(. Заранее благодарю.)
Здравствуйте. Я хочу повторить проект, но вместо L298n хочу использовать TB6612FNG. Подскажите, пожалуйста, прошивка будет работать без изменений? И какие изменения будут в схеме подключения? Заранее спасибо.
Здравствуйте! Серво должен поворачиваться на 90 градусов только? И можно ли прилепить дополнительные серво?
дублирую последний вопрос (но с обозначениями серво понятно) интересует возможность дополнения 1-2 серво в какой строке искать и что дублировать (переменные аля Servo1 менять в состоянии)
как добавить еще пару сервориводов?
![]()
Привет, а где можно скачать такую программу для управления через телефон?Приложения нет. управление происходит через браузер. Читайте внимательнее статью.
Привет, а где можно скачать такую программу для управления через телефон?
Привет, попробую сделать проброс портов и поуправлять сим девайсом удаленно.
Ходовые двигатели работают рывками и с задержкой, а через несколько секунд без остановки. У серво большая задержка, хоотелось чтобы серво поворачивал плавно.
пробую скачать
![]()
Не могу скачать. Нажал на соглашение. А кнопка скачать не кдикабельная...Включите JS скрипты в браузере. Не получается скриншоты на форум
Не могу скачать. Нажал на соглашение. А кнопка скачать не кдикабельная...

Проекты на ESP8266, ESP32
3 февраля , 2021
Комментариев:12
Файлов для скачивания:4
Фото:9
Понравилась статья? Нажми
Cлучайные товары
Адаптер питания DC 5 В 2A 2000MA
Motor Shield для NodeMcu
Читайте также
Мы в соц сетях




Комментарии